
SAFE-UP's Demo scenarios: a breakdown
SAFE-UP is developing innovative passive and active safety systems with the help of 4 demonstrator vehicles. These new technologies aim to improve specific safety-critical scenarios with the goal of reducing fatalities and injuries - in line with the European Union’s Vision Zero.
In order to claim that a safety system is effective, testing activities (both physical and virtual) within SAFE-UP are recreating existing safety-critical scenarios and analysing the impact of introducing these new systems.
LIST OF ABBREVIATIONS


DEMO 1
For the passive safety systems, Demo 1 applies. The testing scenarios explore the crash configuration and the vehicle interior configuration. Three use cases have also been defined:
Peri-urban use case with an L3 vehicle driving in manual mode
Peri-urban use case with an L3 vehicle driving in automated mode
Highway use case with an L4 vehicle driving in automated mode
In the table below you’ll find the description of the crash configuration, as well as the details of the interior configuration, seat positions, and occupant posture. For more details, check out SAFE-UP deliverables 4.1 and 4.2.


DEMO 2
Moving onto the active safety systems, Demo 2 will focus on improved VRU detection under bad weather conditions. The scenarios to be tested were defined in D3.2. Based on the analysis done in D2.6, scenarios can have different parameters depending on whether the crash consequence is a KSI, or if it takes into account all kinds of injuries.
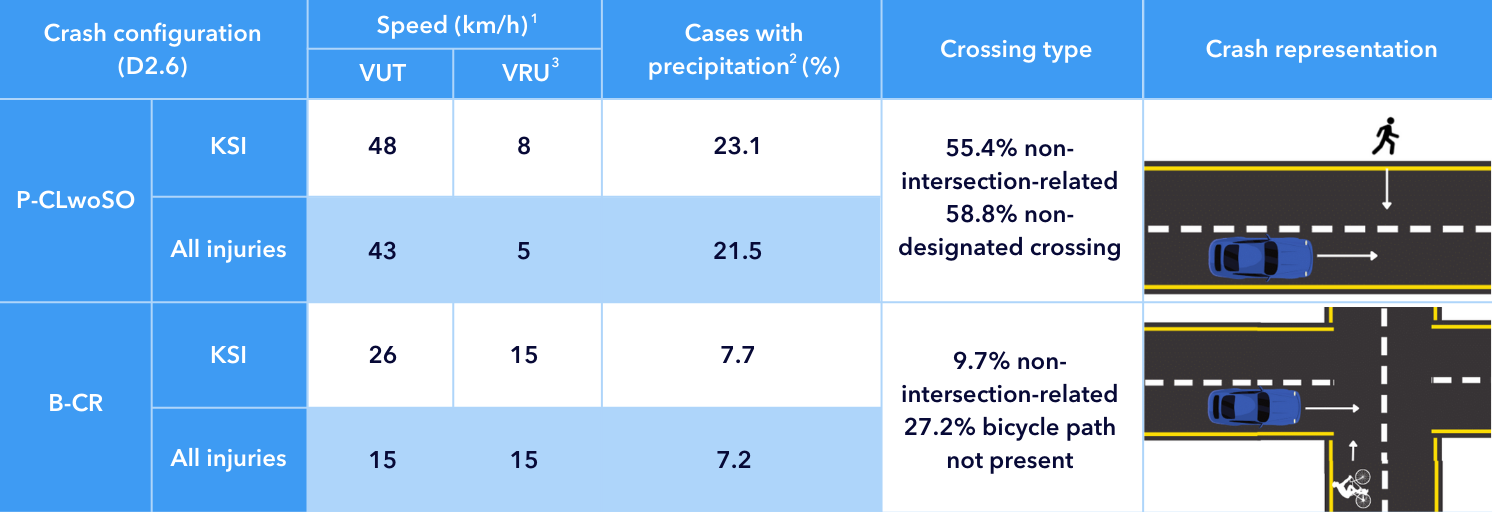
1 Median 2 Rain, snow, hail, or sleet 3 Pedestrian or bicyclist
Other scenarios involving turns were also initially considered interesting for analysis (P-PCTurnL, B-PCTurnL - see D2.6), as they are significantly affected by adverse weather conditions. However, since it’s not possible to perform such turns at THI’s test hall, they won’t be analysed in SAFE-UP.
DEMO 3

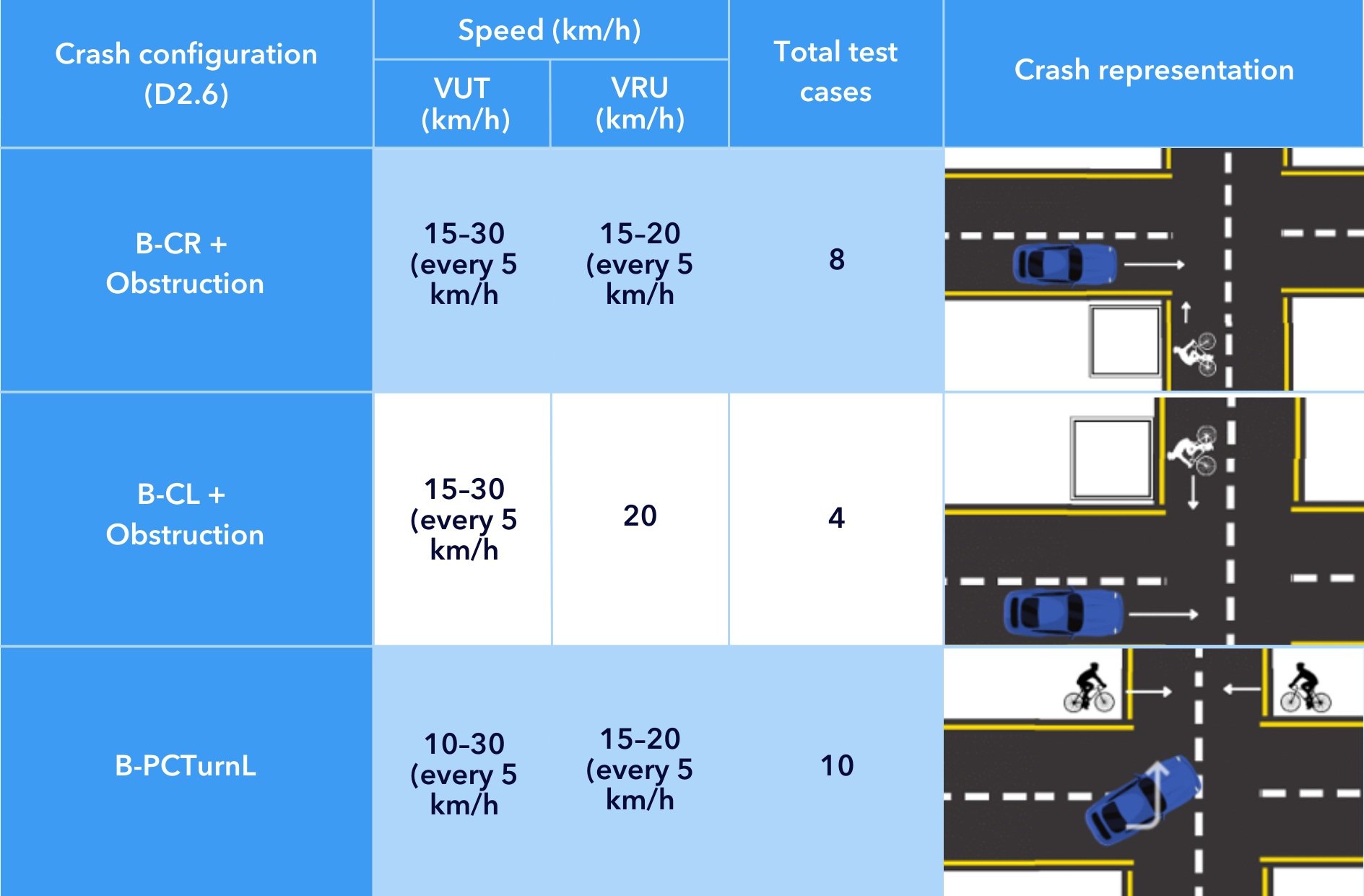
With the main goal of developing advanced safety systems including autonomous emergency steering (AES), Demo 3 will focus on understanding the potential field of effect of such a system, compared to current state-of-the-art active safety systems -mainly autonomous emergency braking (AEB). The relevant scenarios in which this technology could have a positive impact are defined in D2.6 and presented in the table below. In addition to these, partners from Demo 3 will look into obstruction cases for bicyclists.
Currently, BOSCH and ViF are simulating and analysing a full-factorial variation of parameters (scenario type, initial car speed, pedestrian impact speed, lateral impact location, longitudinal impact location, lateral car position on road, and lane width) to define the definitive scenarios. Updates will follow soon.
DEMO 4
Demo 4 will use C-ITS communication to exchange information and generate warnings both for the vehicle and the VRU. The demo will focus on scenarios that are related to KSI injuries and where C-ITS technology may have a safety benefit potential compared to current state-of-the-art systems with VRU detection (like when there are obstructions that hinder VRU visibility from the vehicle). Following this line of thought, in D3.4, the relevant scenarios for Demo 4 were defined. For each test case, there will be 3 runs:
Baseline without V2X
Roadside unit (RSU) and not-connected VRU
Complete V2X
When it comes to car-to-pedestrian crashes, 4 scenarios have been selected.

Regarding car-to-bicycle crashes, 3 testing scenarios have been defined.
Want to get in touch with the SAFE-UP team? Email us at: contact@safe-up.eu